人類の生活圏は大気、大地だけでなく海洋と深く関わる。海底の大地は地球表面の7割を占め、海水(平均水深3,700m)の総質量は全大気の260倍に相当します。工学は、人類が、海の資源の継続的な利用、環境バッファとして働く機能と、生態系への影響を理解しつつ海の持つポテンシャルを活用し、災害リスクの軽減に活用しながら、共生していくことに貢献しなければなりません。
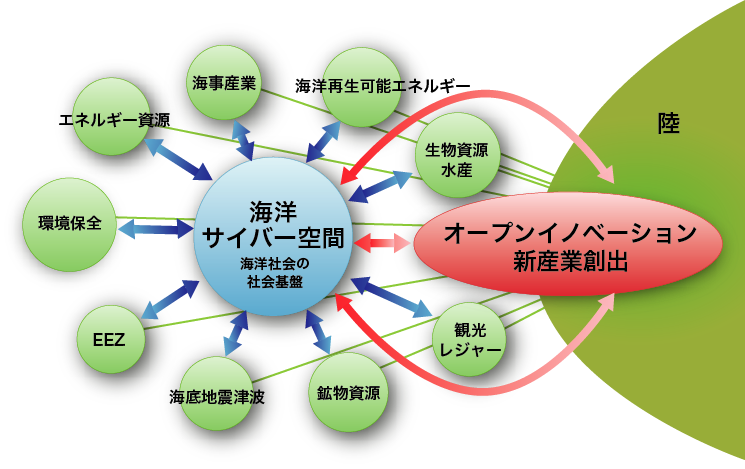
海中観測実装工学研究センターは、先進の海中観測実装工学を基盤として、IoT、人工知能(AI)、ビッグデータ技術を取入れ、海洋のフィジカル空間(現実空間)と高度に融合され、アクセス困難の制約から解放された海洋のサイバー空間(仮想空間)の創出を目指して活動しています。
【平塚沖総合実験タワー】
相模湾平塚沖1km、水深20mの海域に設置されている海洋観測のための研究施設です。
・海洋情報の発信:平塚沖の海象と気象の観測データを配信しています。詳細
・研究の場の提供:海洋関連研究や海洋機器開発などの研究・教育施設として利用しています。
平塚沖総合実験タワー水深7mの海中カメラ動画
1080HD動画(昼)
1080HD動画(夜:ライト点灯)
Youtube海中カメラライブ動画 [期間限定公開]
【関連行事】
水中ロボットコンベンション in JAMSTEC 2026 詳細
開催日:2026年10月17日(土)-18日(日)
主 催:特定非営利活動法人日本水中ロボネット
後 援:東京大学生産技術研究所海中観測実装工学研究センター他
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第9回-
開催日:2026年12月4日(金)
場 所:東京大学生産技術研究所コンベンションホール
主 催:東京大学生産技術研究所海中観測実装工学研究センター
Underwater Technology 2027 (UT27)
開催日:2027年2月28日-3月3日
場 所:東京大学生産技術研究所コンベンションホール
主 催:IEEE OES/IEEE OES Japan Chapter・東京大学生産技術研究所 (IIS)・東京大学地震研究所 (ERI)
【過去の行事】
第15回海中海底工学フォーラム・ZERO 詳細
開催日:2026年4月17日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第8回- 詳細
開催日:2025年12月5日(金)
主 催:東京大学生産技術研究所海中観測実装工学研究センター
第14回海中海底工学フォーラム・ZERO 詳細
開催日:2025年10月17日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
水中ロボットコンベンション in JAMSTEC 2025 詳細
開催日:2025年8月23日(土)-24日(日)
主 催:特定非営利活動法人日本水中ロボネット
後 援:東京大学生産技術研究所海中観測実装工学研究センター他
第13回海中海底工学フォーラム・ZERO 詳細
開催日:2025年4月11日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第7回- 詳細
開催日:2024年12月5日(木)
主 催:東京大学生産技術研究所海中観測実装工学研究センター
第12回海中海底工学フォーラム・ZERO 詳細
開催日:2024年10月11日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
水中ロボットコンベンション in JAMSTEC 2024 詳細
開催日:2024年8月24日(土)-25日(日)
主 催:特定非営利活動法人日本水中ロボネット
後 援:東京大学生産技術研究所海中観測実装工学研究センター他
第11回海中海底工学フォーラム・ZERO 詳細
開催日:2024年4月26日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第6回- 詳細
開催日:2023年12月8日(金)
主 催:東京大学生産技術研究所海中観測実装工学研究センター
第10回海中海底工学フォーラム・ZERO 詳細
開催日:2023年10月13日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
水中ロボットコンベンション in JAMSTEC 2023 詳細
開催日:2023年8月26日(土)-27日(日)
主 催:日本水中ロボネット
後 援:東京大学生産技術研究所海中観測実装工学研究センター他
第9回海中海底工学フォーラム・ZERO Hybrid 詳細
開催日:2023年4月21日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
Underwater Technology 2023 (UT23) 詳細
開催日:2023年3月6日-9日
主 催:IEEE OES/IEEE OES Japan Chapter/The University of Tokyo's Institute of Industrial Science (IIS)/Earthquake Research Institute (ERI)
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第5回- 詳細
開催日:2022年12月8日(木)
主 催:東京大学生産技術研究所海中観測実装工学研究センター
第8回海中海底工学フォーラム・ZERO Hybrid 詳細
開催日:2022年10月14日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
水中ロボットコンベンション in JAMSTEC 2022 詳細
開催日:2022年8月27日(土)-28日(日)
主 催:日本水中ロボネット
後 援:東京大学生産技術研究所海中観測実装工学研究センター他
第7回海中海底工学フォーラム・ZERO Online 詳細
開催日:2022年4月22日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第4回- 詳細
開催日:2021年12月9日(木)
主 催:東京大学生産技術研究所 海中観測実装工学研究センター
第6回海中海底工学フォーラム・ZERO Online 詳細
開催日:2021年10月8日(金)
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター他
【出展】海洋都市横浜 うみ博2021~海を観察する・利用するための研究をのぞいてみよう~ 詳細
開催日:2021年7月22日-9月30日
場 所:バーチャルうみ博2021
主 催:海洋都市横浜うみ協議会
水中ロボットコンベンション in JAMSTEC 2021 ~海と日本プロジェクト~ 詳細
開催日:2021年8月28日(土)-29日(日)
主 催:日本水中ロボネット
後 援:東京大学生産技術研究所海中観測実装工学研究センター
第5回海中海底工学フォーラム・ZERO Online 詳細
開催日:2021年4月23日
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所海中観測実装工学研究センター
Underwater Technology 2021 Online -Underwater Video Competition (UT21 Online)
開催日:2021年3月2日
場 所:UT21 Online
主 催:IEEE OES Japan Chapter/The University of Tokyo's Institute of Industrial Science (IIS)/Earthquake Research Institute (ERI)
水中ロボットコンベンション in JAMSTEC 2020 ~海と日本プロジェクト~ 詳細
開催日:2020年12月5日-6日
主 催:日本水中ロボネット
後 援:東京大学生産技術研究所海中観測実装工学研究センター
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第3回- 詳細
開催日:2020年12月4日
主 催:東京大学生産技術研究所 海中観測実装工学研究センター
東京大学柏キャンパス一般公開2020(オンライン開催)
開催日:2020年10月17日-10月31日
場 所:大きな実験水槽/海で活躍する装置やロボット
第4回海中海底工学フォーラム・ZERO Online 詳細
開催日:2020年10月16日
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所 海中観測実装工学研究センター
【出展】海洋都市横浜 うみ博2020~海を観察する・利用するための研究をのぞいてみよう~ 詳細
開催日:2020年8月1日-9月30日
場 所:バーチャルうみ博
主 催:海洋都市横浜うみ協議会
第3回海中海底工学フォーラム・ZERO [WEB会議] 詳細
開催日:2020年4月24日
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所 海中観測実装工学研究センター
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 -第2回- 詳細
開催日:2019年11月22日
主 催:東京大学生産技術研究所 海中観測実装工学研究センター
第2回海中海底工学フォーラム・ZERO 詳細
開催日:2019年10月18日
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所 海中観測実装工学研究センター
第1回海中海底工学フォーラム・ZERO 詳細
開催日:2019年4月12日
主 催:海中海底工学フォーラム・ZERO 運営委員会
協 賛:東京大学生産技術研究所 海中観測実装工学研究センター
ワークショップ:海底ケーブルの科学利用と関連技術に関する将来展望 詳細
開催日:2018年9月19日
主 催:東京大学生産技術研究所 海中観測実装工学研究センター
